
高性能カメラの光軸

スマホや、自動車、セキュリティーカメラなど、今や小型カメラは身近にあふれています。しかも実用化が進む5GやAI技術の後押しもあって、カメラ需要は今後も急激に増加することでしょう。また、スマホカメラを例にとると、半年ごとに更新される高機能化の勢いには、目を見張るものがあります。本格的なカメラと比べて、超小型であるにもかかわらず、きれいな写真が撮れることには本当に驚かされます。
こうした小型カメラの急成長は、カメラ製造技術の発展が下支えしています。数量的にも莫大な生産を実現するため、様々な自動製造装置が活躍しています。その中に、カメラの光軸を測定し、ずれを修正する装置があります。もし光軸がずれるとカメラ本来の性能が著しく悪化し、しばしば「片ボケ」と呼ばれる不具合が起こります。図1は、片ボケをCGで再現したものです。このように画面の両側のピントがボケたり、片側だけボケたりします。原因の一つがレンズの光軸ずれです。図2のアニメーションは、レンズの光軸が傾くと、ピントが合うベストフォーカス面がどのように変化するかを表しています。
このように、レンズのわずかな傾きが拡大され、ベストフォーカス面が大きく傾きます。高性能カメラでは高い精度、例えば0.1度以下の精度で、レンズの傾きを調節する必要があります。
光軸調整の方法
高性能カメラの光軸調整は、実際のレンズとセンサの組合せで撮影した画像を確認しながら、レンズの位置を調節して固定します。この調整方法をA.A.(Active Alignment)と呼んでいます。具体的にはピントが合うベストフォーカス面や画面の中心位置を測定し、レンズのXYZ位置と傾きの誤差を測定して修正します。通常はこの測定と修正のループを2~3回程度繰り返して目標精度に追い込んでいきます。
従って、最終的に得られる光軸の精度は測定が担っているとも言えます。
3Dチャートはカメラの光軸を従来に比べて高速・高精度に測定する新しい技術です。
3Dチャート技術
カメラのピントが合うベストフォーカス面は、チャートと呼ぶ特殊な被写体を撮像して測定します。
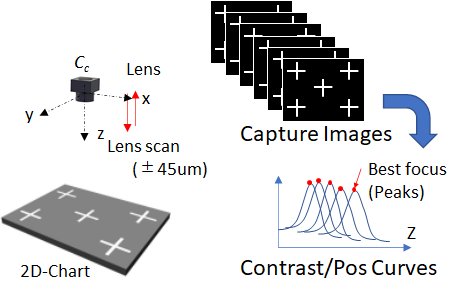
まず従来の2D(2次元)チャートを使った方法を右図に示します。
最初に、レンズを少しずつ光軸に沿うZ方向に動かしながら、2次元のチャートを何枚か撮像します。チャートには多くの種類がありますが、ここでは5つの十字を描いたパターンで説明します。
次に、得られた画像の十字パターンについて、コントラストを計算します。コントラストは焦点が合った時に最大になり、ぼやけた画像では小さくなります。その結果、ベストフォーカス位置で最大になる山形の「コントラスト・位置曲線」が得られます。この曲線のピーク位置、すなわちベストフォーカス位置が5か所で求まり、その5か所の位値からベストフォーカス面を計算し、光軸の位置と傾きが求まります。
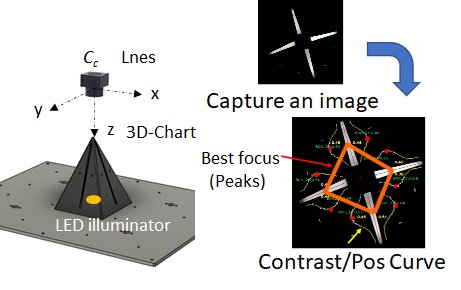
次に、3Dチャートを用いた方法を左図に示します。この方法では立体物の被写体を撮像します。この画像を小さな領域に分割し、それぞれの領域内でコントラストを計算します。
さきほどと同様、コントラストは焦点が合っている部分で最大になり、ぼやけた部分では小さくなます。そして、「コントラスト・位置曲線」のピークが、最もピントが合った位置となります。立体物の設計形状はわかっているので、ピントが合った位置と高さの3次元的な位置がわかります。この点をいくつも測定すると、それらをフィッティングしてベストフォーカス面が求まります。
この方法は、従来の方法に比べてとてもシンプルですが、次のメリットがあります。
1 高精度
従来法ではレンズを動かすので、その機械的な運動誤差が必ず発生します。
しかし、新しい方法では動く部分が無いので、高精度です。
また、一般的なカメラの光学系は、物体側の被写体が、縮小されてセンサ面に投影されます。
従って、物体側の3Dチャートの誤差も縮小されるため、高精度が期待できます。
2 高速
従来はレンズを動かして撮像することを繰り返す必要がありました。
従ってレンズの移動時間と、画像を撮像して、データ転送する時間が、複数回必要でした。
しかし、新しい方法は画像を1枚撮像するだけですので、かなり高速に測定できます。
原理確認の実験
次に原理確認の実験を説明します。実験の目的は、3Dチャートを使ったアクティブアライメント工程を実現して、従来法と比較することです。
アクティブアライメント工程では、カメラ画像を観察しながらレンズとセンサを正しい位置に調節します。
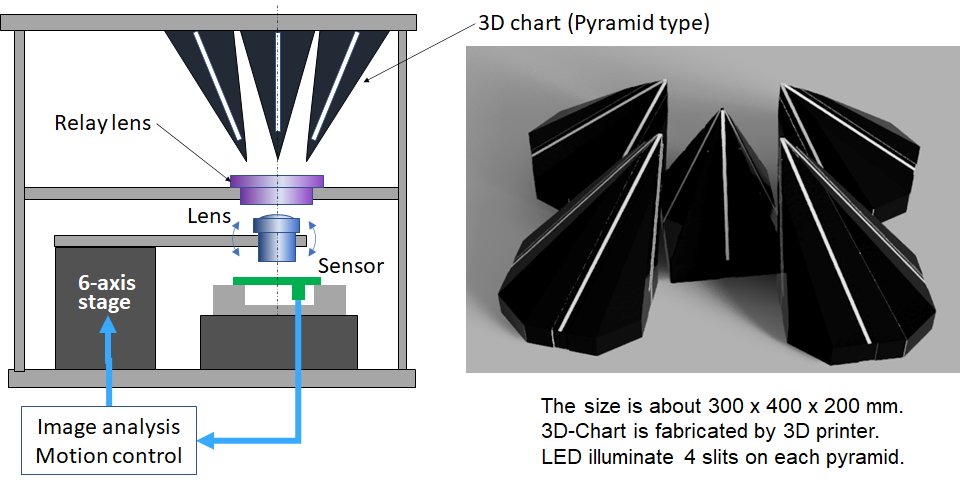
右図に示すように、固定したセンサの上にレンズを配置し、リレーレンズを介して3Dチャートを撮像します。リレーレンズは一種のマクロレンズで、カメラの焦点位置を手前に変換します。例えば10mの焦点位置を0.2mに変換します。このレンズのおかげで、実験装置を小型にできます。
使用する3Dチャートは5つのピラミッドを集合したデザインにしました。この構造をカメラで撮影すると、十文字のスリットが5箇所に写ります。
この画像を解析してカメラのベストフォーカス面の位置姿勢を測定します。
測定値がずれていれば、そのずれをキャンセルするように、6軸ステージを使ってレンズの位置姿勢を調整します。この調整は、測定値が目標を満足するまで繰り返し行います。その目標値ですが、高性能カメラの生産を想定し、目標精度を4μm、目標時間を2秒に設定しました。
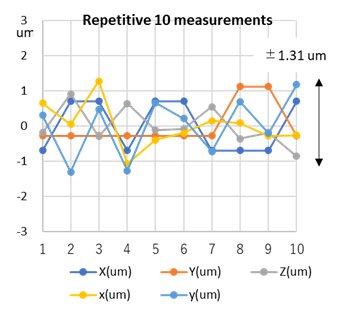
まず、レンズを動かさずに10回連続測定した結果を左図に示します。ここで、大文字のX、Y、Zは3方向の並進移動を表します。また小文字のx、yは傾斜です。単位をμmに統一するため、傾斜はセンサの受光面外周の変位で表現することとしました。
この結果から、測定再現性が±1.31μmであることがわかります。これは目標精度の4μmに対して十分に小さな値です。また、このばらつきの主な原因は、画像を取得するごとにランダムに変動するわずかなノイズであることがわかっています。従って、撮像センサのノイズを低減できればさらに高精度が期待できます。
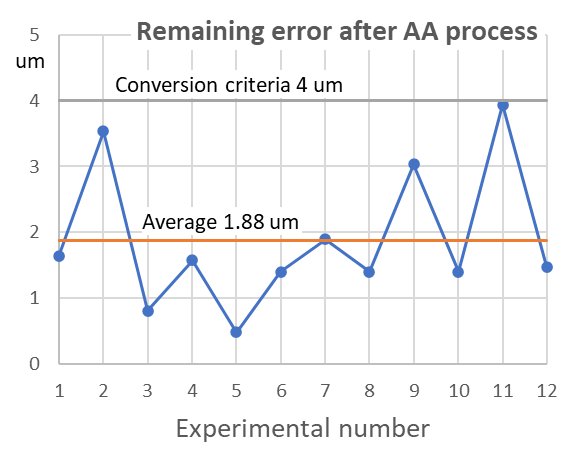
次に、アクティブアライメントの実験結果を示します。実験は、まず、ランダムに約40μmずらした初期の位置姿勢から開始します。そして測定と調整を繰り返し、測定値が目標の4μmに達したところで終了とします。
左図は12回実験を繰り返した結果です。平均残差は 1.88μmでした。
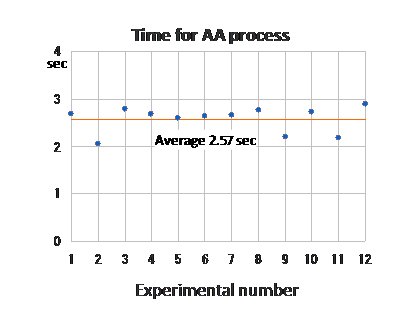
そして左図はこの時のアクティブアライメントに要した時間を示します。平均で2.57秒でした。目標の2秒を超えていますが、原因が6軸ステージの移動時間であることがわかっています。

以上の結果をまとめると、表1になります。従来の2Dチャートを用いたアクティブアライメントと比較すると、おおよそ2倍高精度で3倍高速という結果でした。
まとめ
高性能カメラの性能を測定する3Dチャート技術について解説しました。この技術の一つの応用先に、カメラの画像を見ながらベストフォーカス面を測定し、光軸を調整するアクティブアライメント工程があります。実際にアクティブアライメントを行う原理確認実験を行った結果、次の性能を確認しました。
1 測定再現性は±1.31μm
2 アクティブアライメント精度は平均1.88μmで、従来の2Dチャート方式より約2倍高精度
3 アクティブアライメント時間は平均2.57秒で、従来の2Dチャート方式より約3倍高速
また、カメラの性能に空間周波数応答、SFR(Spacial Frequency Response)があります。 通常は2Dチャートを用いて測定しますが、これについても3Dチャートによって高速に測定、評価できる可能性があります。また別の機会にご紹介したいと思います。